

Functionality of Rover's Movement
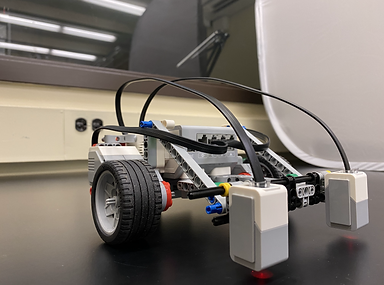
The movement functions of Rover were originally created to turn in each direction and after that, move forward. After completing this simple part, we had to make sure that Rover would stay in the correct square and not move past the white line. This was much harder since if we went any distance over the white line without an input we would be disqualified.
At first, Rover was moving over the white lines but with some fine-tuning, it would stop at the white lines. Now, what if one light sensor is touching the white but the other isn't? This would mean that Rover is uneven and needs to be adjusted. In order for Rover to adjust its position, it would need to power the wheel of the side that received no change from the light sensor. This would allow the robot to be a lot more centered than before.
Logic of Rover's Algorithm
In the early stages of this project, we were looking at the Wumpus World and determining what would be necessary to solve a puzzle like this. Of course, we would need a memory of where we have been and a way to store this memory. The algorithm would need a memory of where it has been and possible locations of the wumpus, the gold, and holes all throughout the map. We would also need a memory of all of the safe positions that we have come across on the board.
To solve this puzzle we would also need to use our memory in order to make decisions on where to go on the grid. For example, if you sense a breeze and nothing else, the best decision you could make is to go back to the position you were at before you sensed the breeze. Now if you know where the breeze is exactly through your memory of the other locations on the board, you can make the decision to move to a new spot that isn't the spot where the breeze is. This same logic can be applied to all of the possible dangers in the Wumpus World.
After acquiring the gold, the algorithm would have to go back to the initial position. To solve this, we would have to go through our memory of where we have been and find the most efficient path back to that position. Luckily, we had done something similar in Computer Science Class so this wasn't too bad to figure out.